
Blog
Puppy Pi: Raspberry Pi-Based Quadruped Robot for AI and STEM Learning
Product Description
PuppyPi is an AI vision quadruped robot driven by Raspberry Pi 4B and built on the Robot Operating System (ROS). It is equipped with 8 stainless steel coreless servos, delivering high-precision performance, rapid rotation speed, and a robust torque of 8KG .cm. With an IMU sensor, PuppyPi can detect its posture in real-time, enabling self-balancing capabilities.
Linkage Mechanism, Efficient Movement
PuppyPi’s legs employ a linkage mechanism to increase the angular velocity of its lower legs. The independent movement of different parts of the leg contributes to a greater rotation range.
Gait Planning, Free Adjustment
Walk, Amble and Trot gaits can be realized through adjusting touchdown time, lift time and lifted height of each leg as well as the speed of switching front legs and hind legs.
Product Structrue
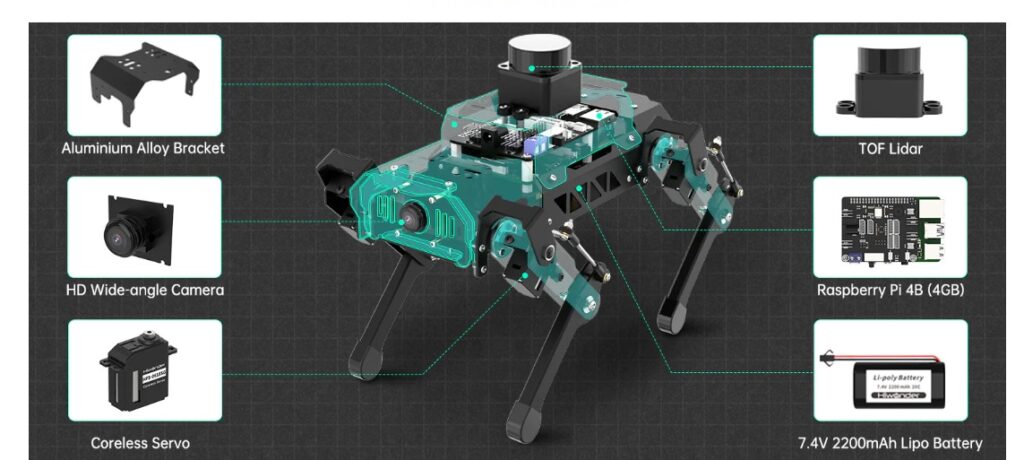
Equipped with Coreless Servos
Equipped with stainless steel coreless servos which features high accuracy, fast rotation speed and strong torque.
FPV Image Feedback, APP Control
PuppyPi supports Android and IOS dual-system APP control, which not only allows body remote control, but also allows you to see the first visual image of the robot dog.
ROS Robot Operating System
Global Popular Robotic Communication Framework
ROS is an open-source meta operating system for robots. It provides some basic services, such as hardware abstraction, low-level device control, implementation of commonly used functionality, message-passing between processes, and package management. And it also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It aims at providing code reuse support for robotics research and development.
